
J’ai trouvé une boite en plastique alimentaire au supermarché du coin avec un couvercle assez haut pour loger les composants électroniques.

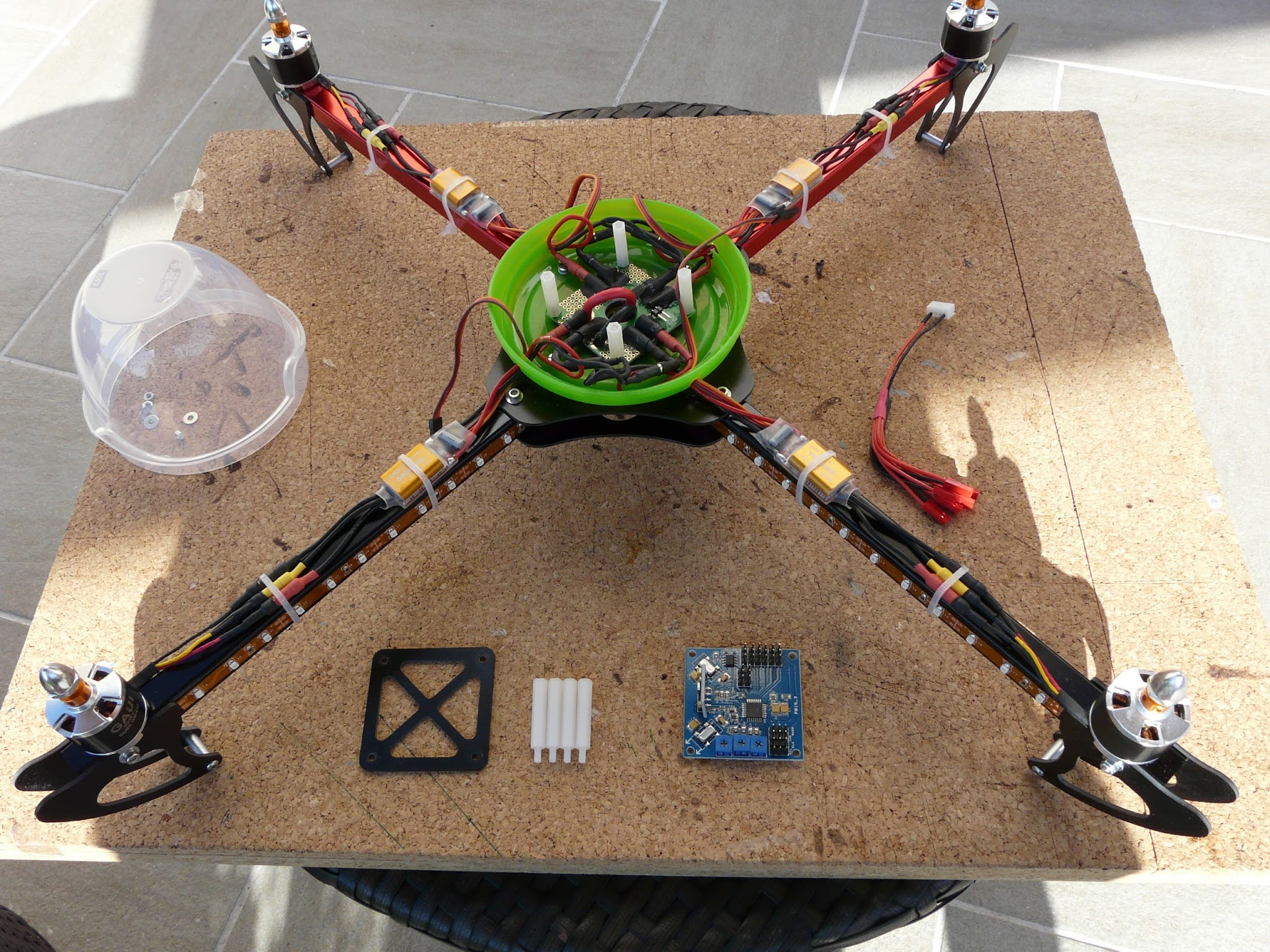
En bas de la frame on voit la plaque de support haute, les colonnettes pour celle ci et la carte KK de controle du quad qui va être montée entre les colonettes du bas et du haut. Sur la droite les 4 sachets contiennent les bandes adhésives de diodes qui seront posées sur les bras de la frame.
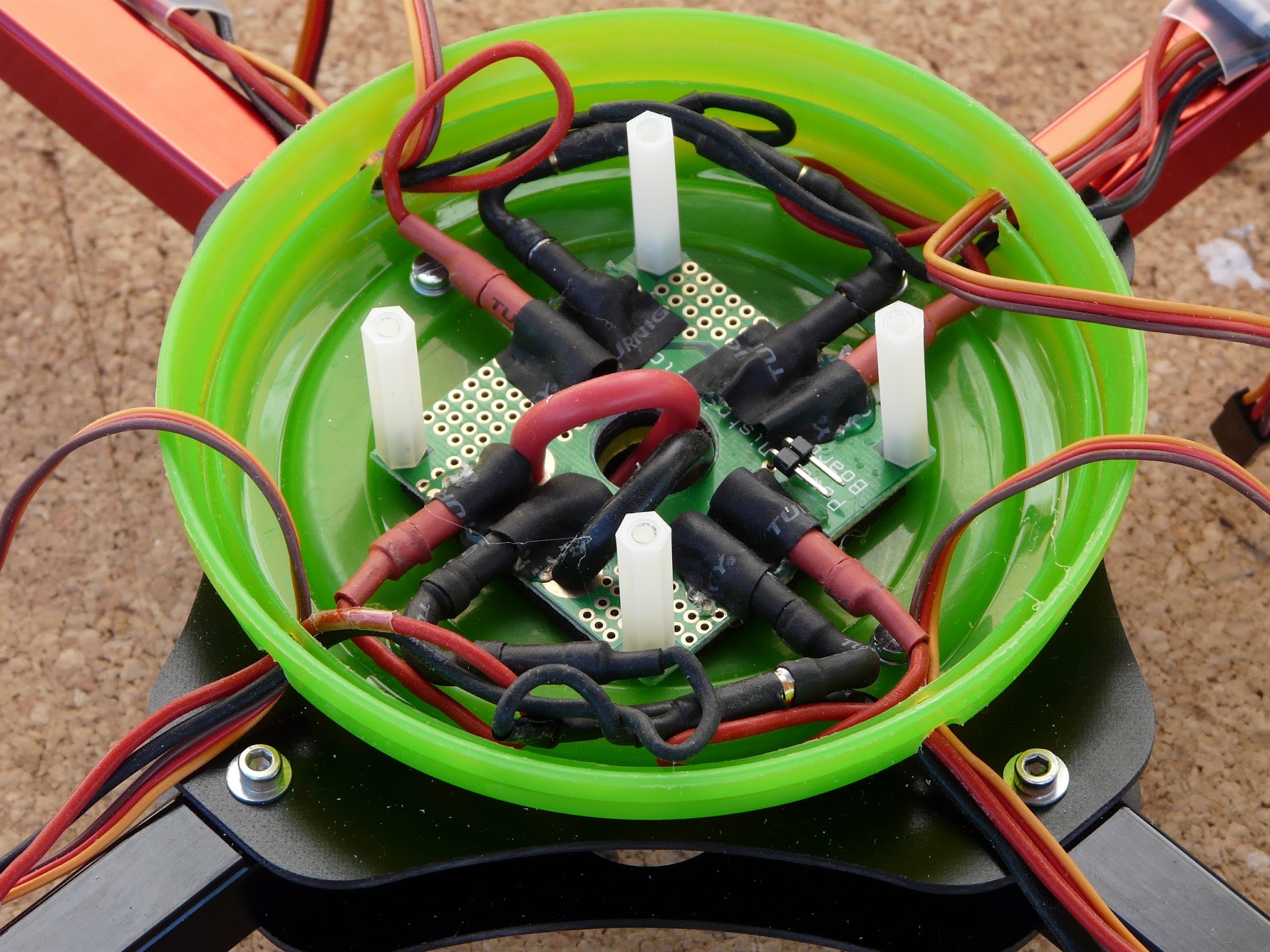
Les vis de fixation de support des cartes sont insérées sous la frame et sont vissées dans les colonnettes de support sur la carte de distribution électrique


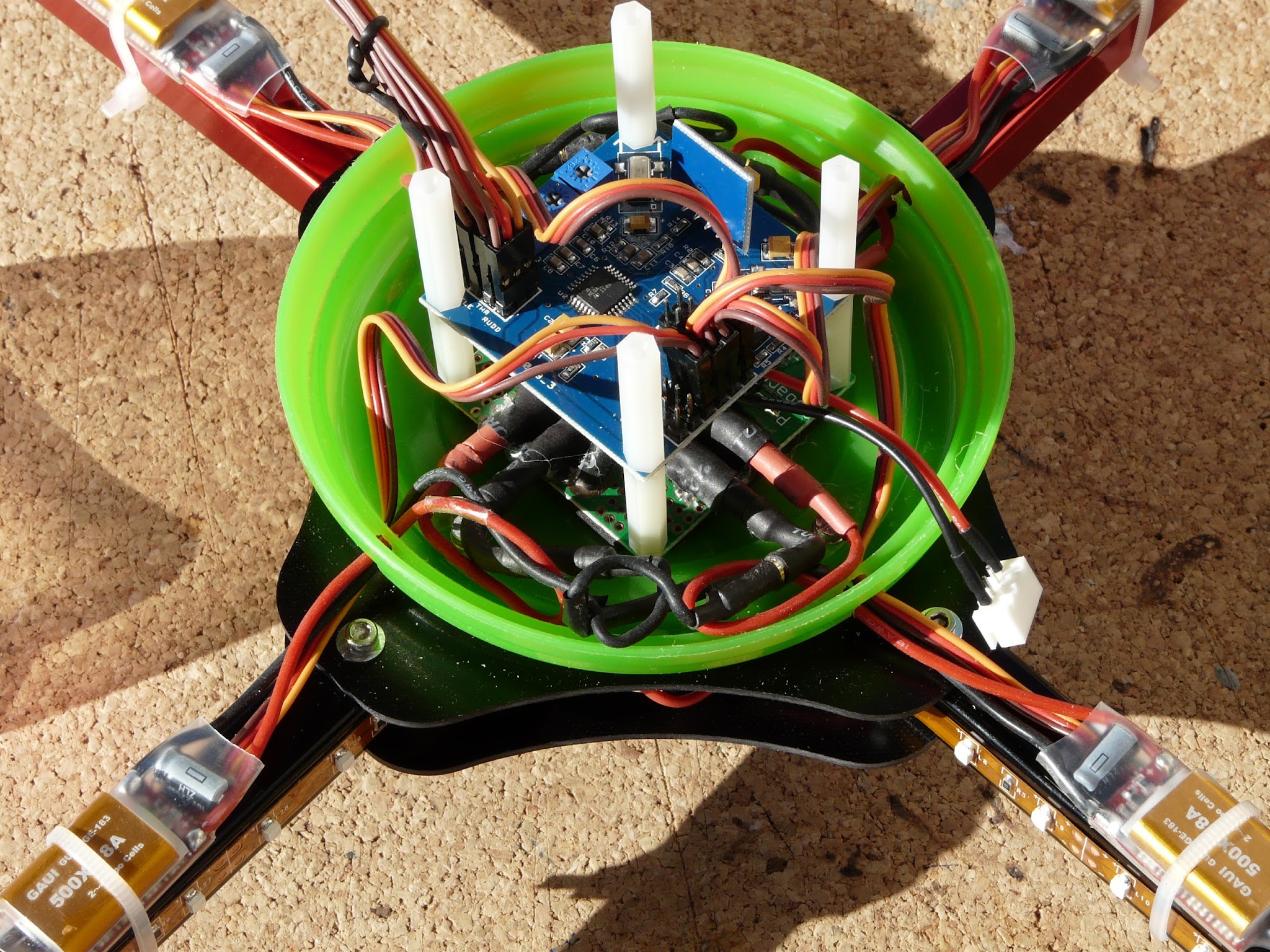
Les fils de servo des controleurs sont mis en place sur la carte, en bas à droite. Attention à l’ordre branchement, pour un montage en X avec le firmware 2.5 il faut brancher dans l’ordre de 1 à 4 le moteur en haut à gauche 1, puis tourner dans le sens des aiguilles, haut droite 2, bas droite 3 et bas gauche 4.

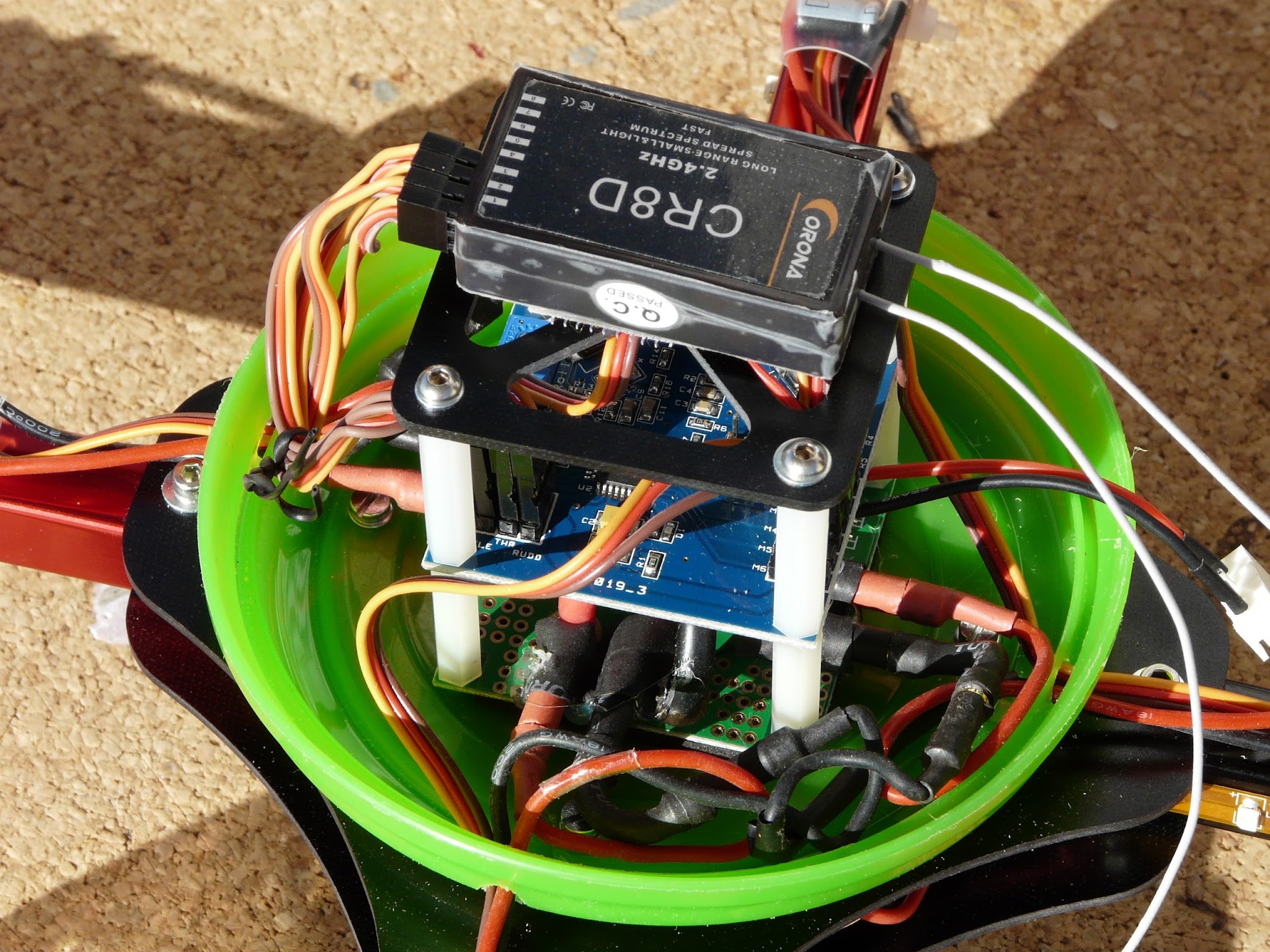
En gros plan on voit également les fils de connexion vers le récepteur sur la partie partie gauche de la carte, dans le sens suivant : Aileron, Profondeur, Gaz, Dérive.
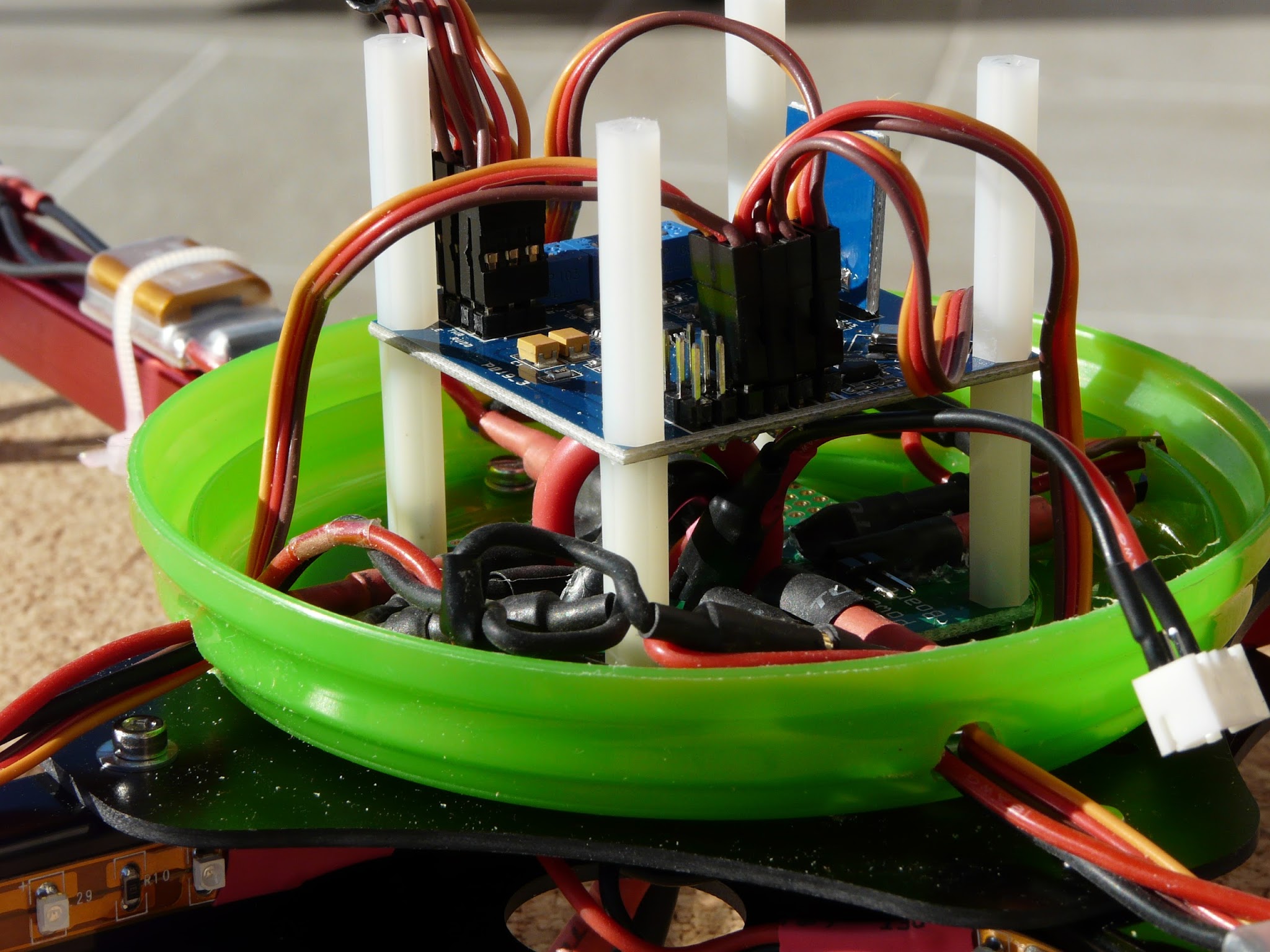

On peut alors poser la plaque de support haute sur laquelle vient le récepteur fixé avec un velcro sur cette plaque.

Et on coiffe l’ensemble avec le couvercle en plastique transparent.

Voici le quadcopter ainsi terminé.



Voici le quadcopter en vol :
XCopter HobbyKing X550 & HK Board v3 from pierre milcent on Vimeo.
Et les premières prises de vue avec la GoPro embarquée.
(Rédigé et posté avec Blogsy sur iPad)
