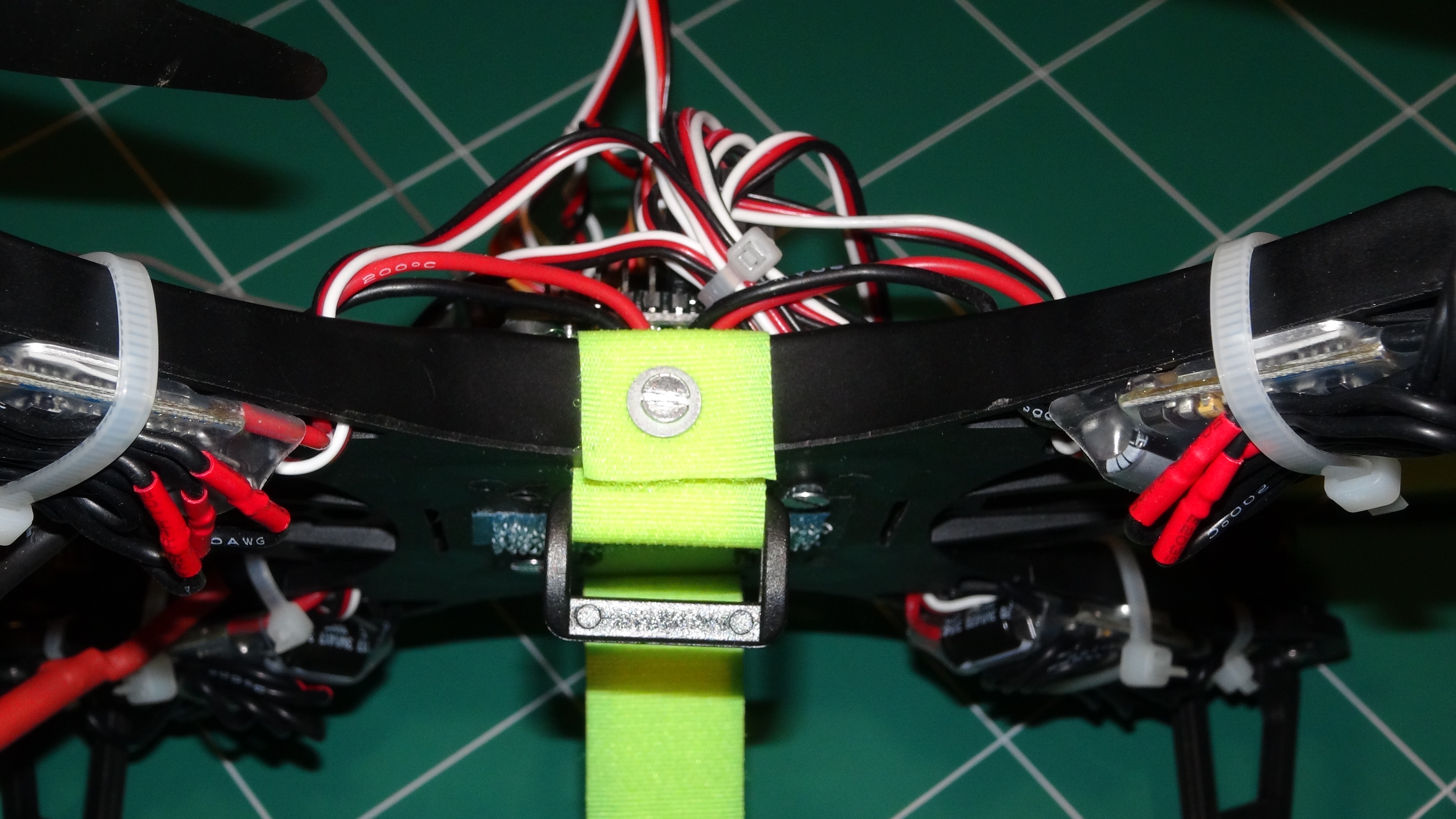
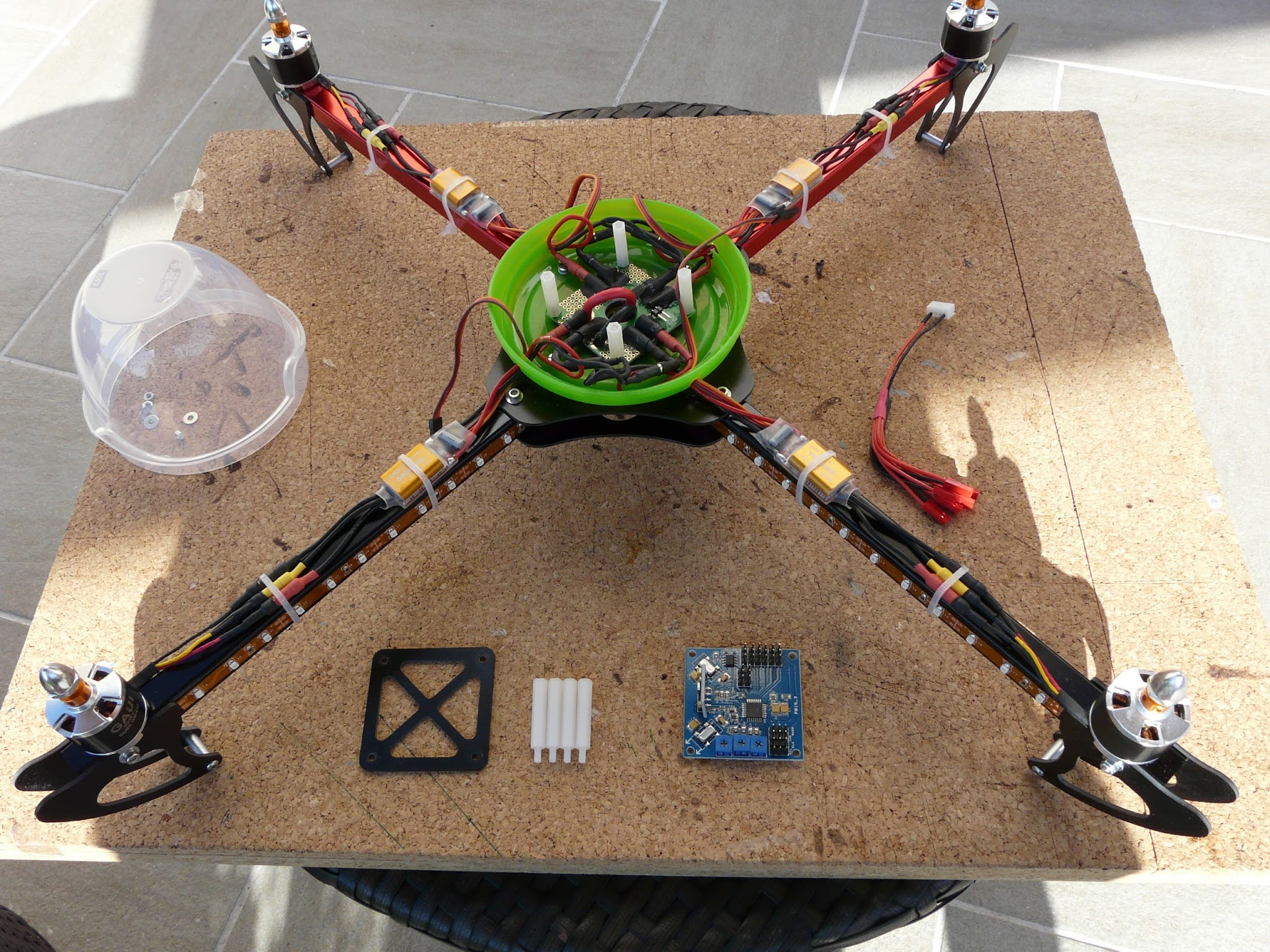
Voici quelques recommandations de montage du Quad HK250L, je m’attarde ici sur les éléments moteurs et controleur, ainsi que la carte de distribution.
Première étape la fixation de la bande velcro qui me sert à attacher l’accu si on choisir de la mettre sous la frame. J’ai coupé la bande velcro pour un ajustement précis et fait une fixation de chaque coté avec des petites vis de 10mm de long et écrou


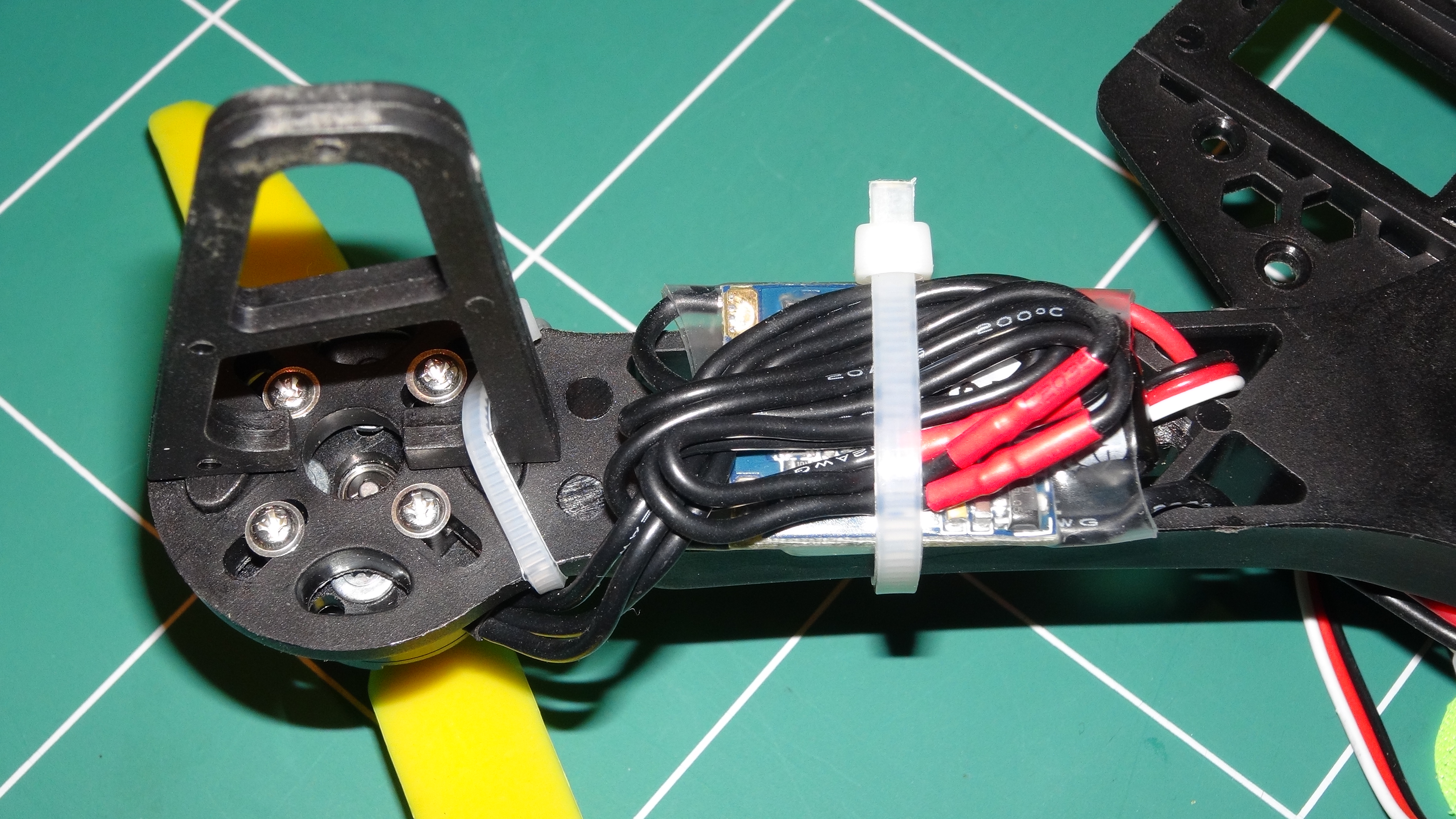
Point important concernant les fixations des moteurs. Les trous percés conviennent pour des écartements entre axes de 12 et 16mn. Hors les percements sur les bras ne conviennent que pour l’écartement de 16mm, il faut donc faire un léger agrandissement pour les 2 autres trous. Un foret de 3mm sur une dremel suffit amplement pour allonger 2 trous opposés de 2mm chacun et permettre la pose des moteurs. Le moteur est monté sur un support plastique lui même fixé ensuite au bras.
Les « trains » du bras sont assurés par un collier rizlan afin de laisser l’opportunité de les enlever si besoin.
Les fils d’alimentation moteurs sont soudés aux controleurs. Il faut au préalable avoir fait une vérification du sens de rotation de chacun des moteurs (j’utilise un bout de scotch pour maintenir en contact les brins entre eux), et éventuellement alterner un des brins d’alimentation avant soudure. Je fixe aussi les brins du controleur avec du scotch sur l’accu lipo pour alimenter le controleur.
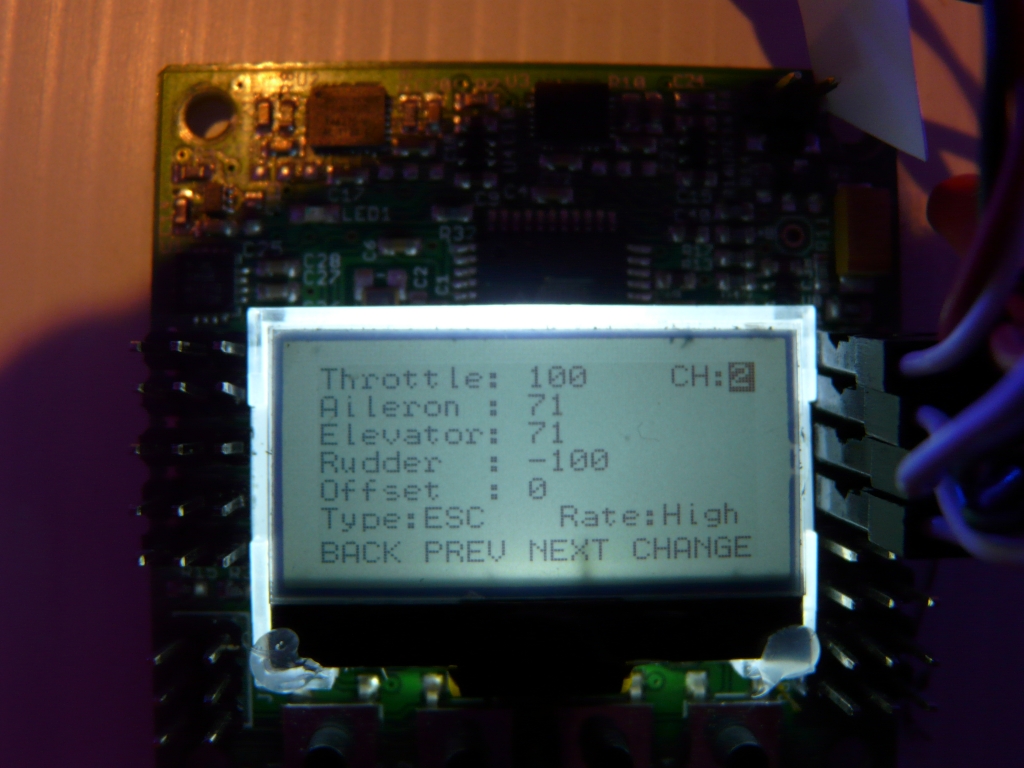
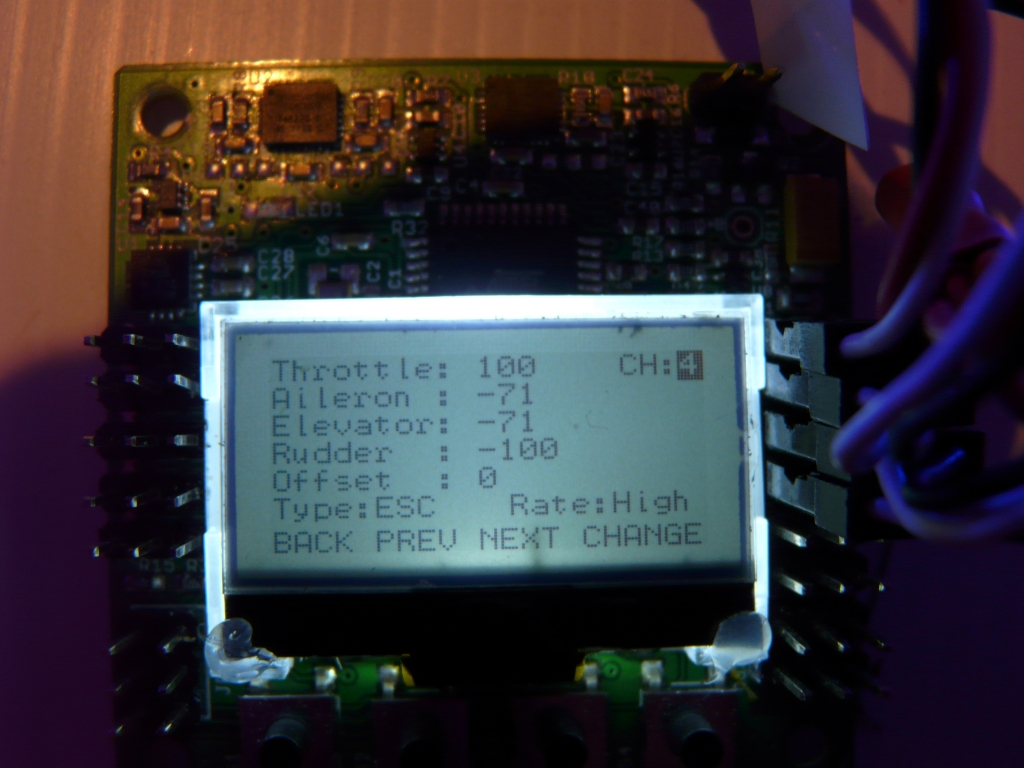
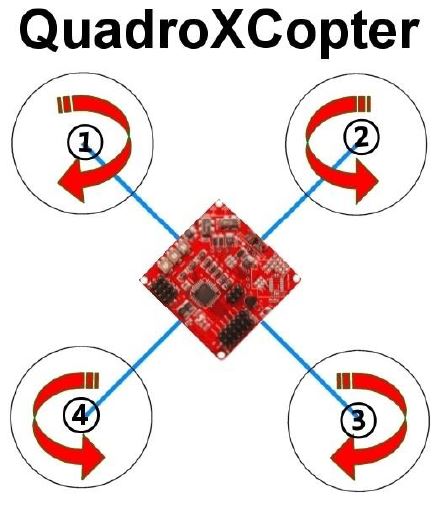
Voici un rappel de sens de rotation des moteurs pour une quad monté en X avec une carte HK 2.1 : 1 et 3 sont CW (ClockWise, dans le sens horaire des aiguilles d’une montre), 2 et 4 sont CCW (Counter Clock Wise, sens anti horaire).
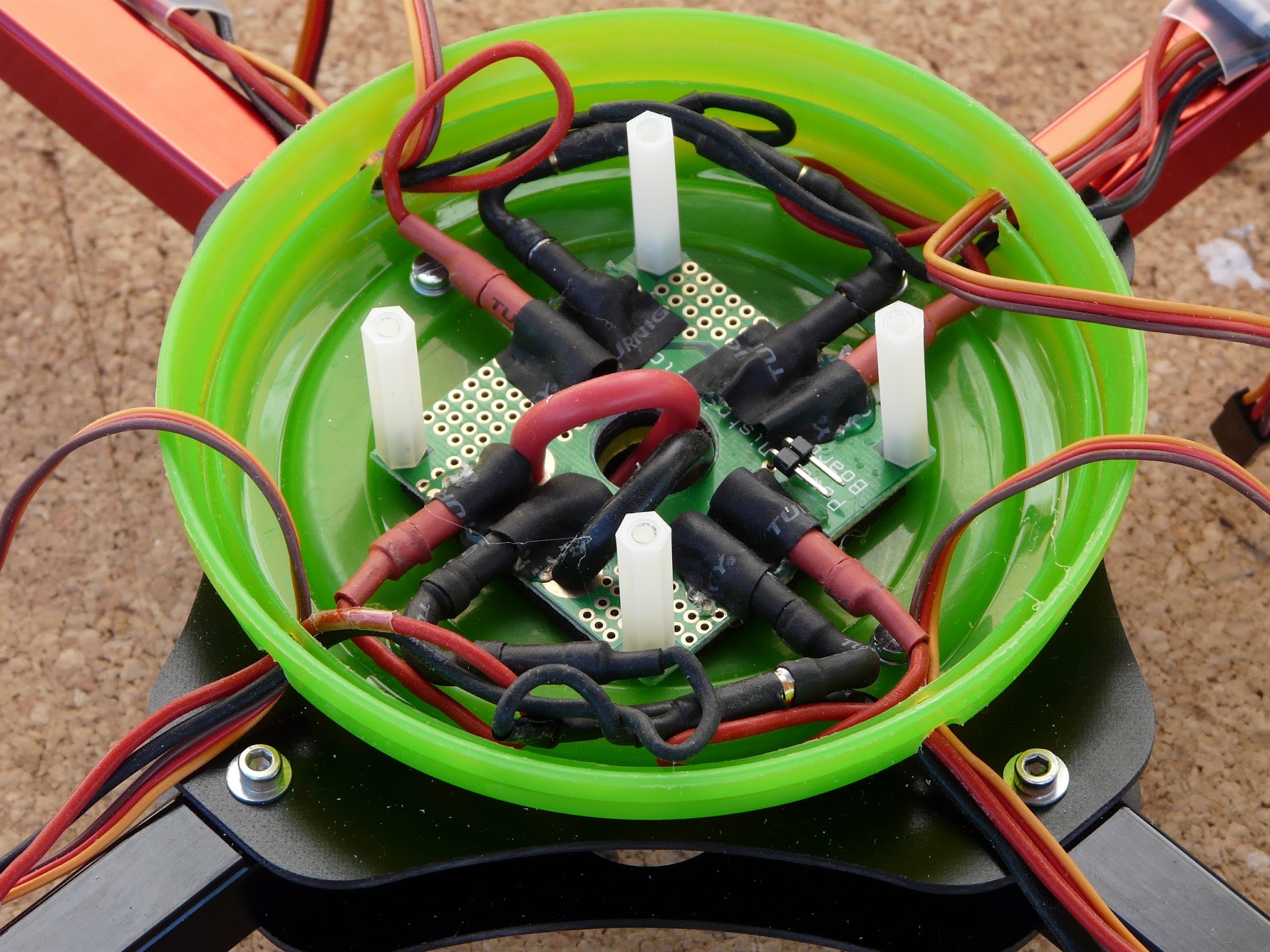
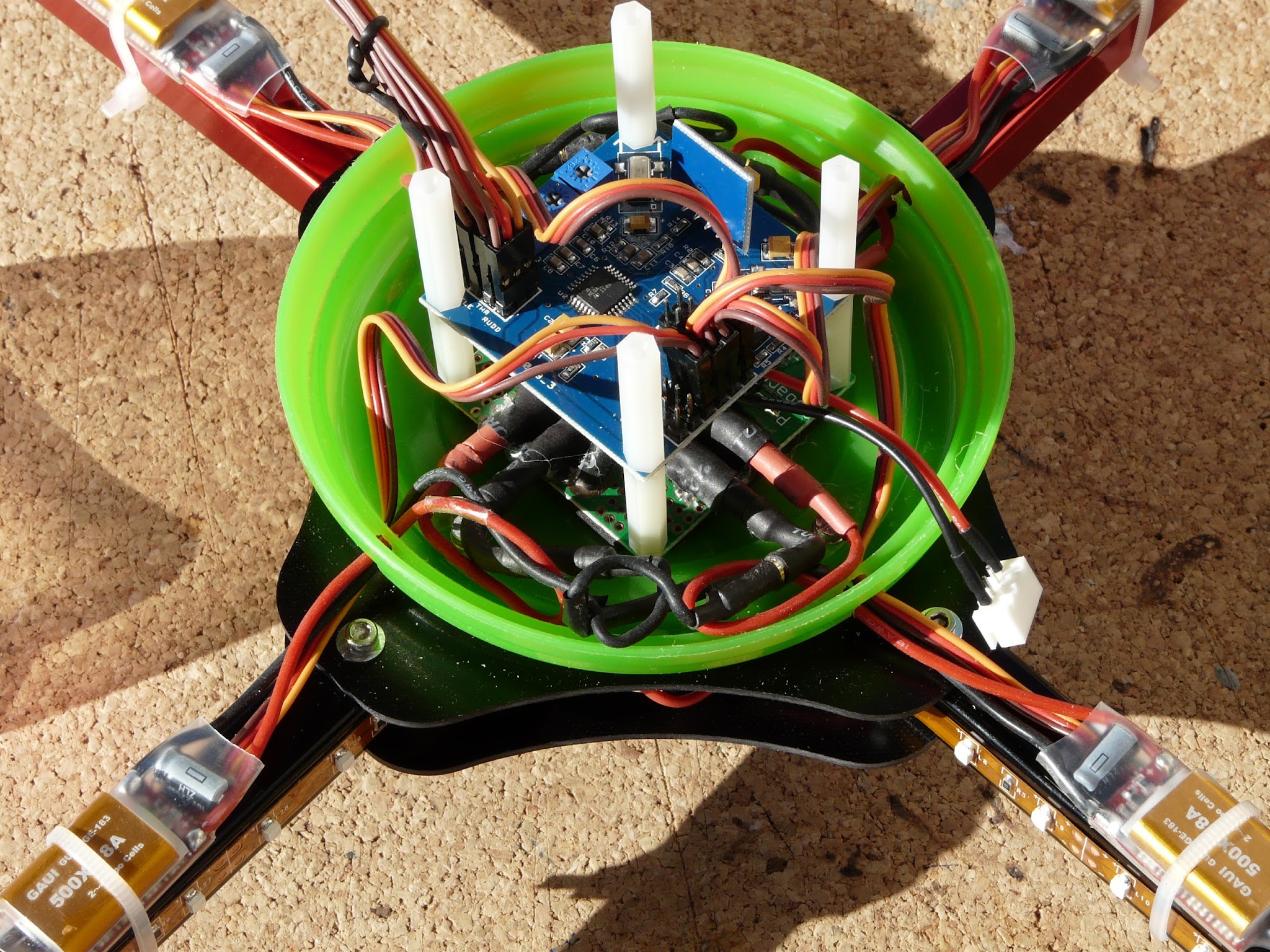
Les fils d’alimentation des contrôleurs sont soudés sur la platine de distribution électrique. Les fils du même signe sont posés soit à l’intérieur du cercle marqué sur la carte, l’alimentation du même signe se faisant sur le point de soudure avec un cercle. Soit à l’extérieur du cercle et dans ce cas l’alimentation se fait sur le point de soudure non encerclé comme ceci : 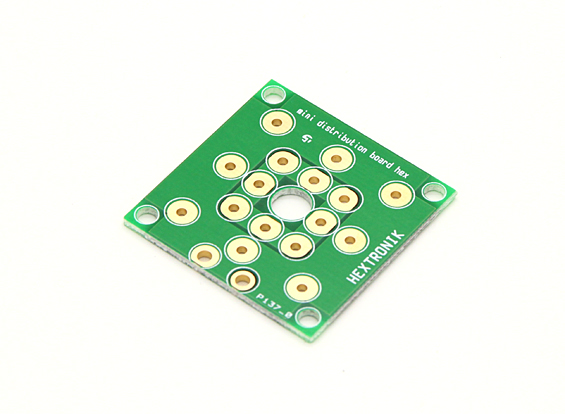
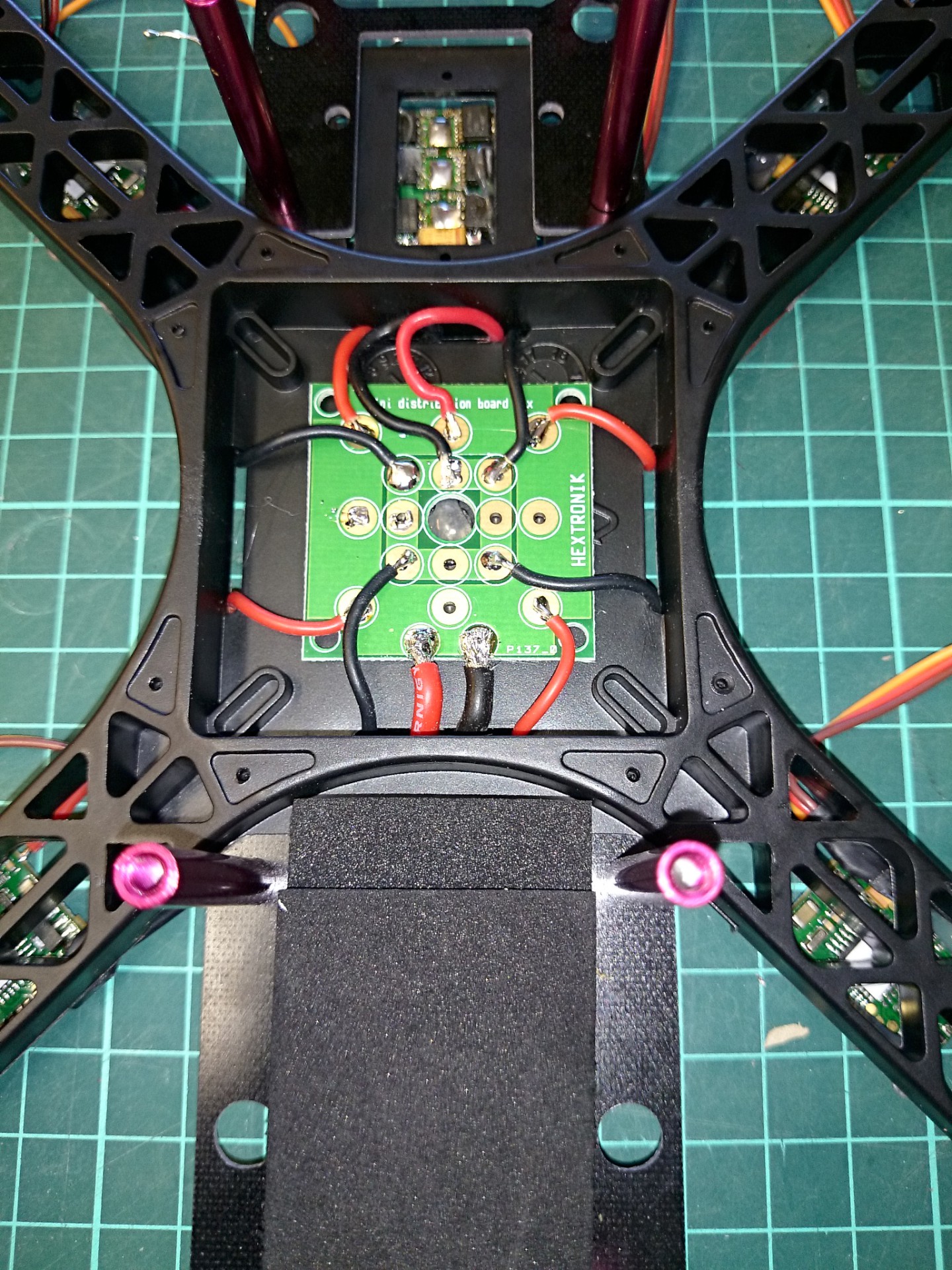
On voit bien ci dessus les points de soudure dans le cercle qui doivent correspondre au point en bas à droite.Il y a au moins 4 points de soudure pour les moteurs dans le cercle et à l’extérieur. On peut se servir d’autres points pour alimenter une les par exemple, en 12V bien sur avec un accu 3S.

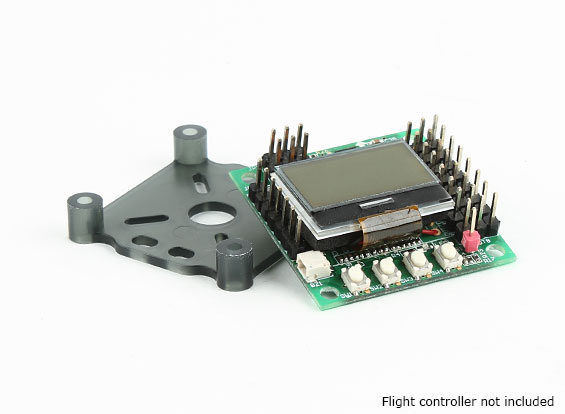
Celle-ci est fixée au fond de la frame du Quad avec 2 vis de 30mm qui sont recoupées à la longueur exacte des deux supports. Prendre de préférence des vis nylon avec des écrous nylon, prudence aux court circuits si vous avec des vis métal comme c’est le cas ici … mais je n’ai eu aucun souci (je n’avais pas de vis nylon de cette longueur … je les remplacerai dès qu’elles seront arrivées).
Vue du dessous :

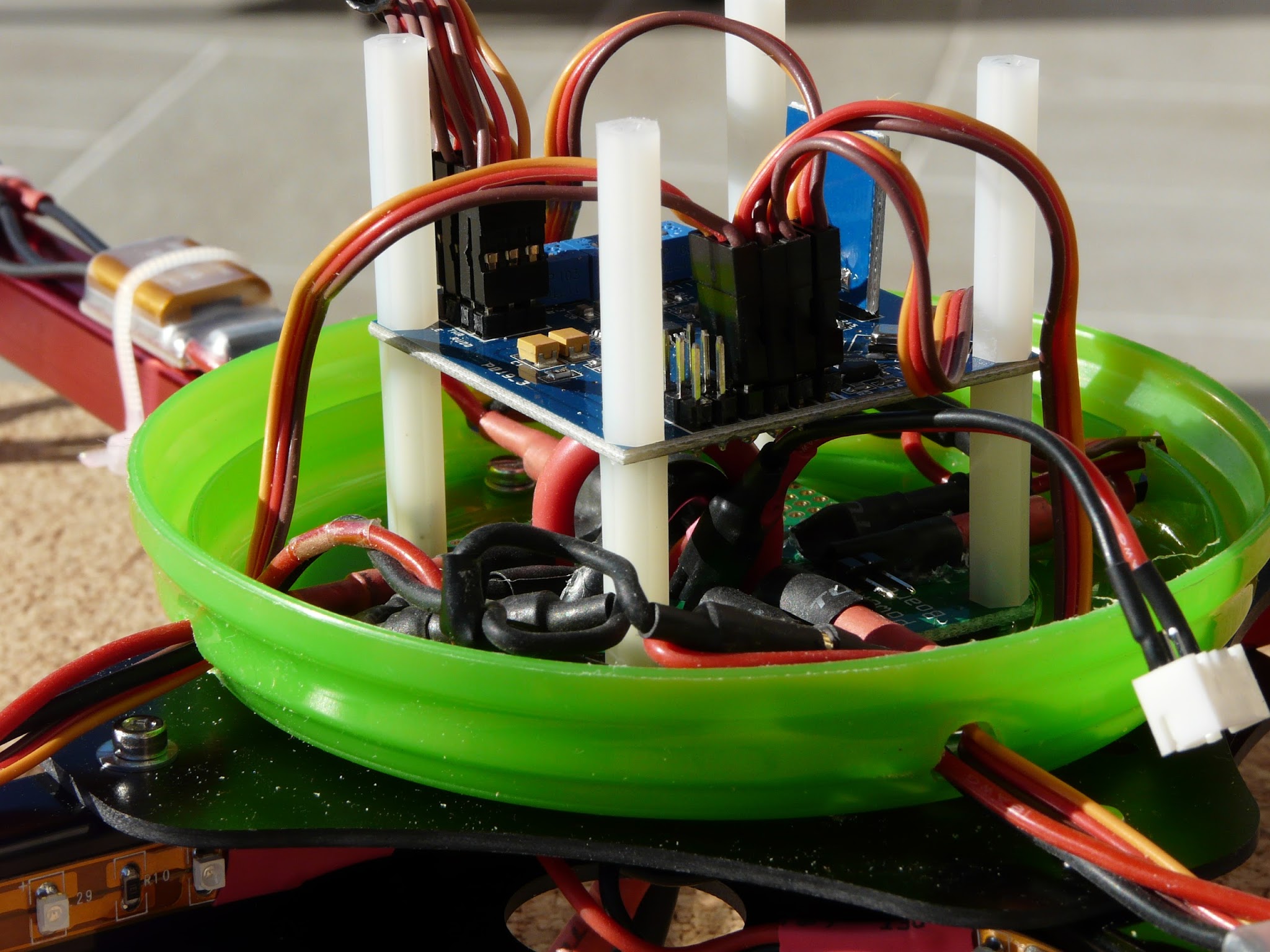
Installation avec la carte et les 2 supports :

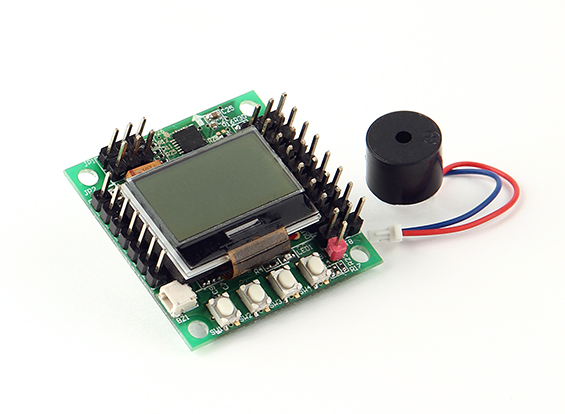
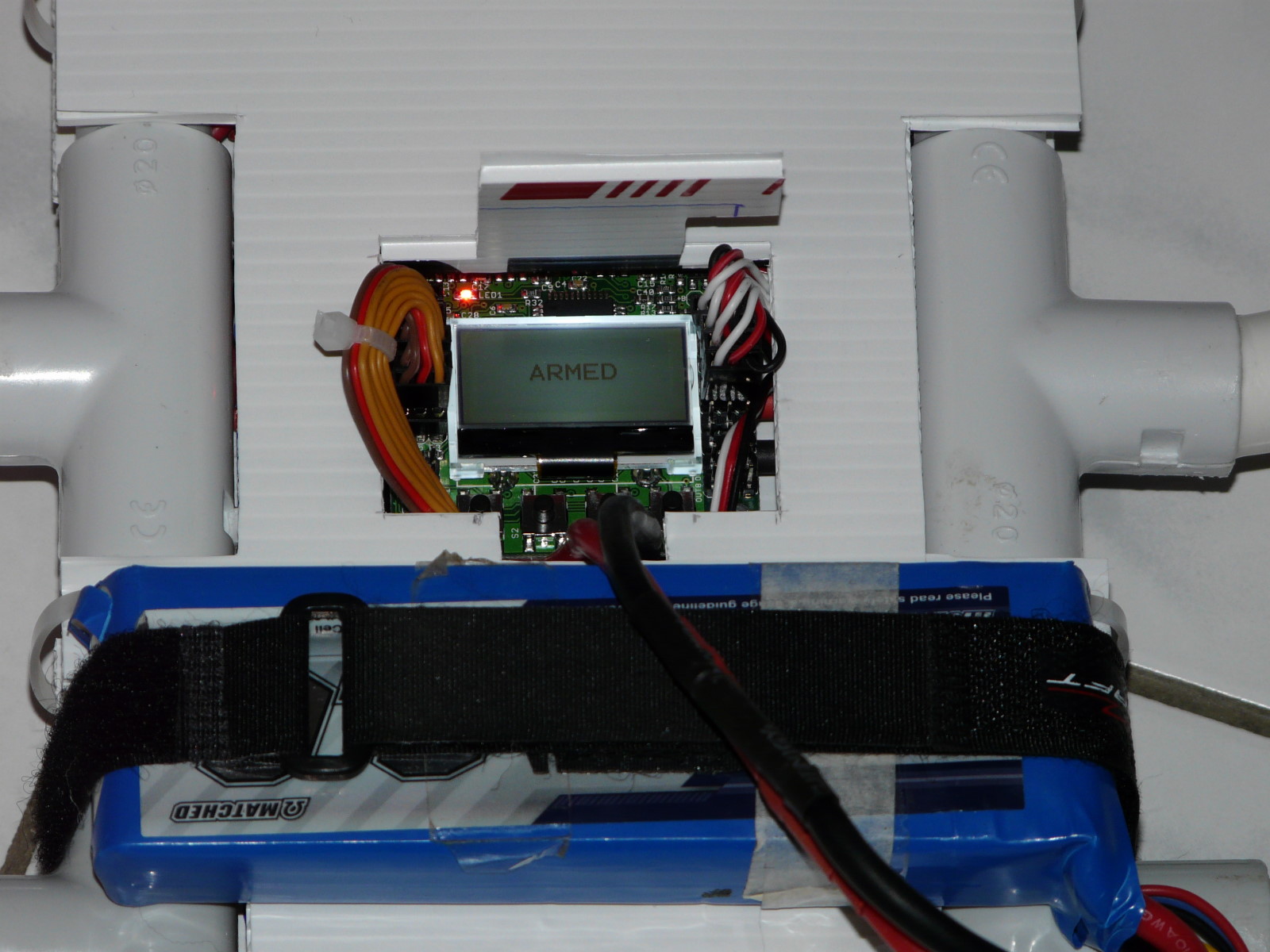
Ensuite les fils d’alimentation des contrôleurs sont posés sur la carte HK, coté droit. La carte étant fixée boutons en bas, écran en haut en avant dans le sens de la marche du Quad. Ils sont posés dans l’ordre de haut en bas : 1, 2, 3, 4.

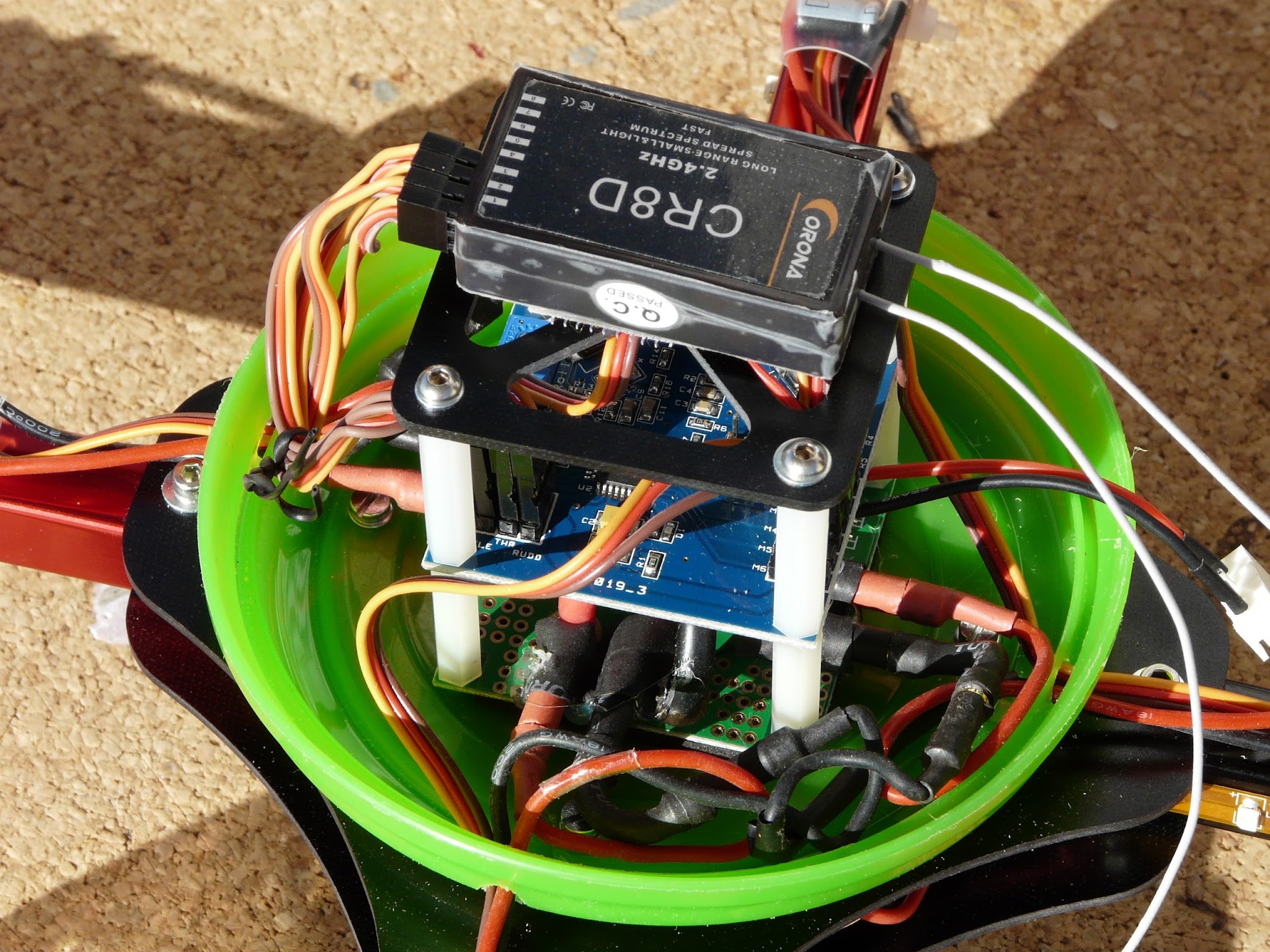
Les rallonges male/male sont fixés sur la partie gauche de la carte et reliés au récepteur comme ceci.
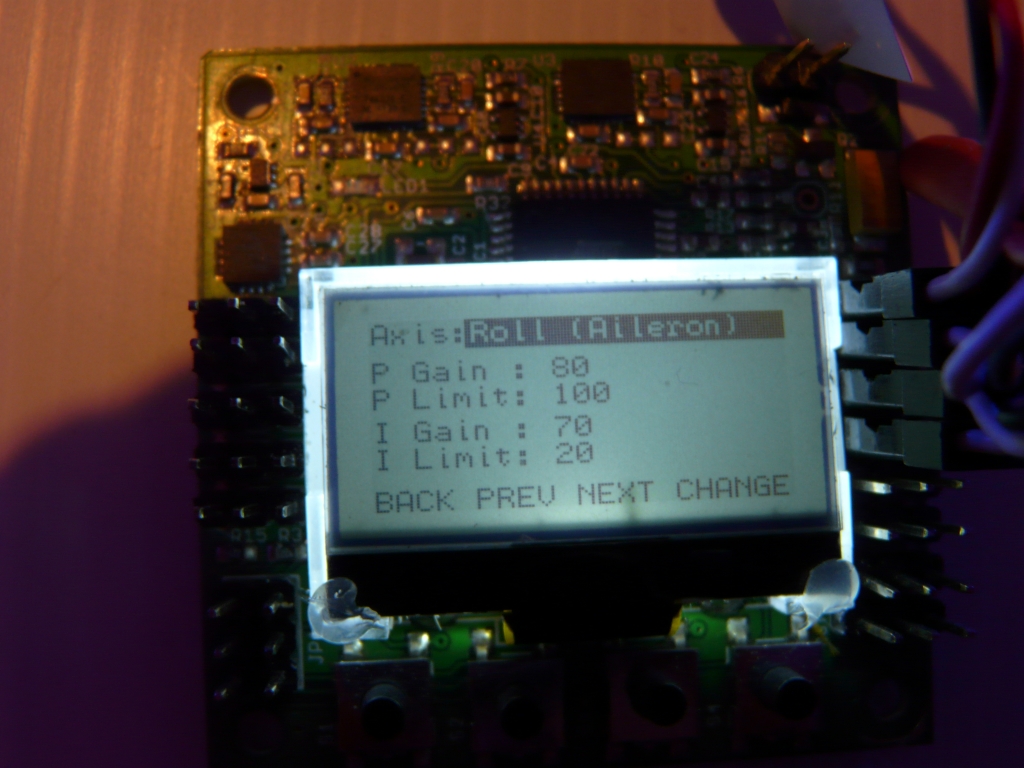
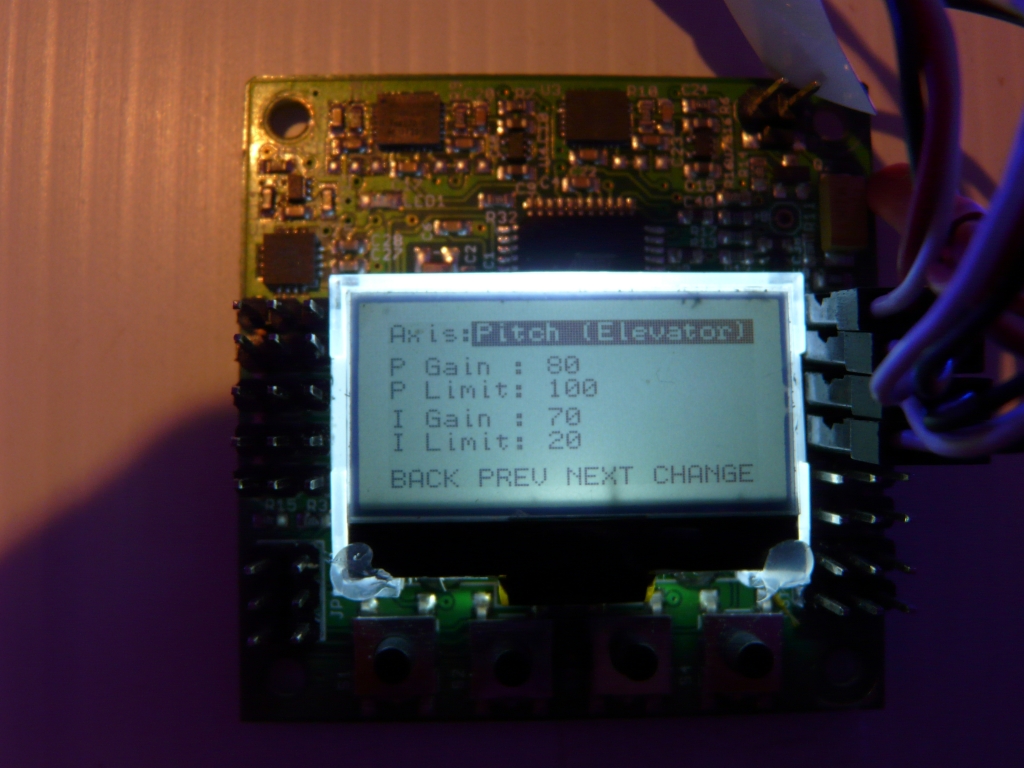
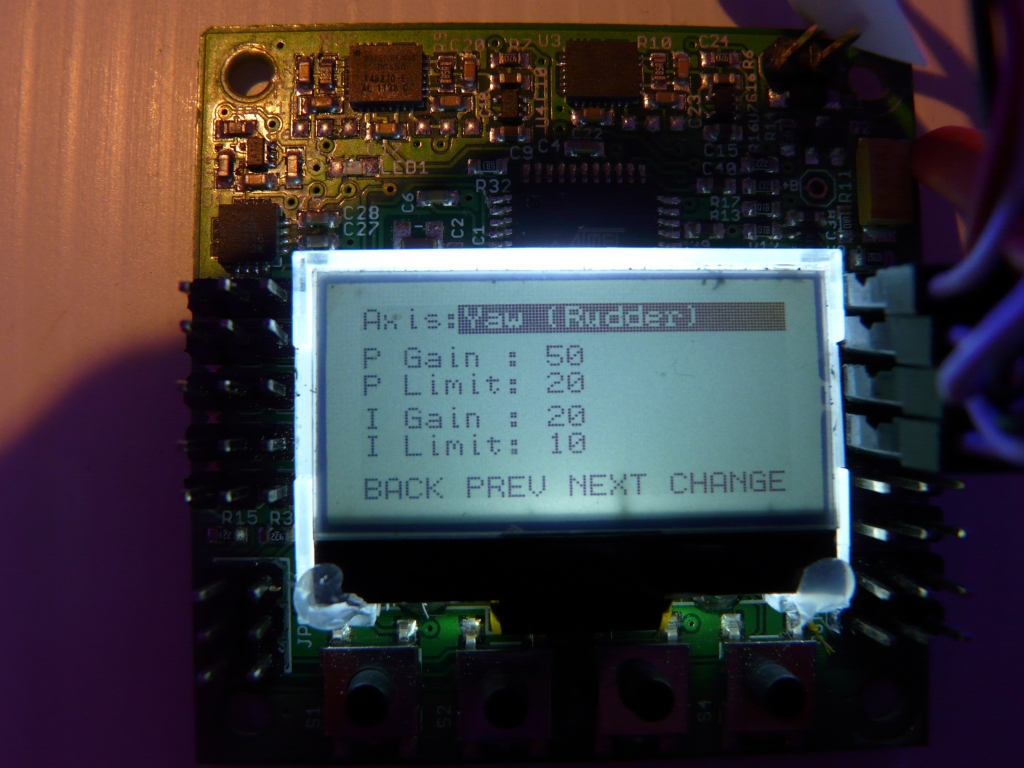
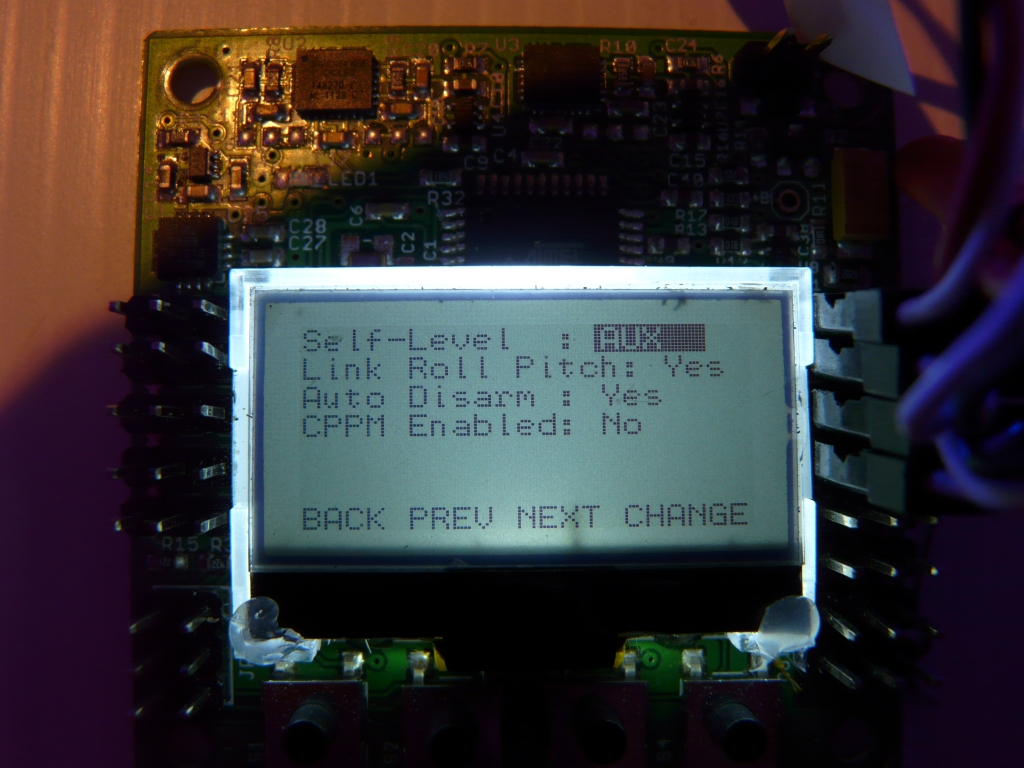
La voie 5 sert à activer le mode auto stabilisation de la carte.