Eric Latour a publié un article sur Jivaro.org décrivant une construction originale de quadcoptère à base de tuyau en plastique pour protéger des câbles électriques. Etant un adepte de la construction plastique, les SPAD à base de coroplast, je me suis lancé dans une adaptation de ce modèle.
Je l'ai appelé le Quadriolo type « araignée » en raison d'une ressemblance avec cette forme. Dites moi si un nom plus sympa vous vient à l'esprit.
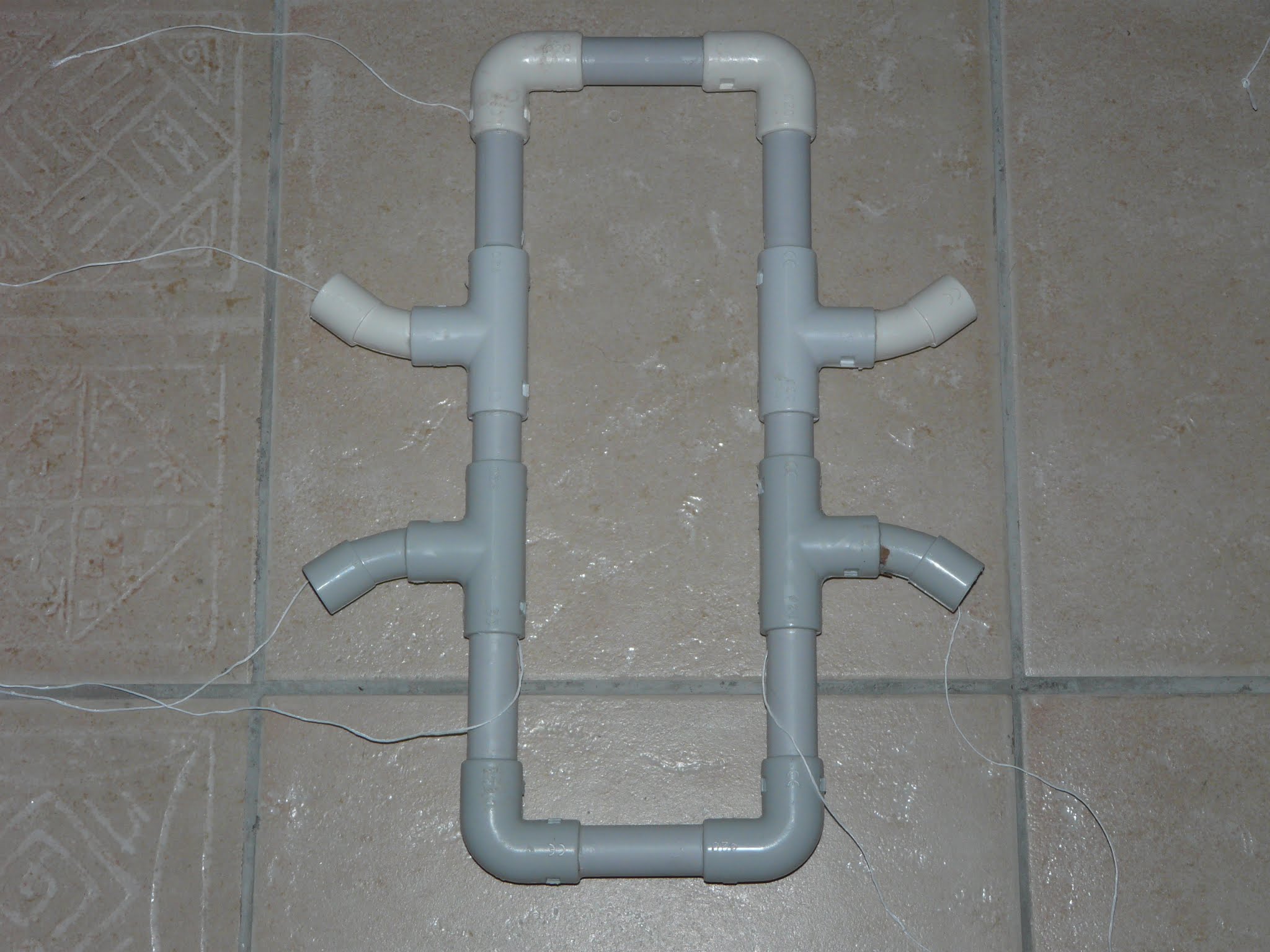
J'ai conservé la forme de base de la version en H, un rectangle de 30cm par 11cm avec des angles droits plus courts, mais les bras sont en X. Pour parvenir à cette forme j'ai coupé les courbes larges à 90° en deux.
J'ai utilisé pour les collages des tubes la colle PVC conseillée pour ce matériau car elle agit en dissolvant le plastique, le résultat est très rigide.
La liste des pièces requises est la suivante :
- Le bati principal est constitué de 2 tubes de 30cm (j'ai opté pour un diamètre 20mm, mais je pense que le 16mm pourrait convenir sans crainte et avec un gain de poids) et 2 tubes de 9cm ;
- Les bras sont faits de 4 tubes de 18cm ;
- 4 raccords en T, 4 angles cours 90°, 4 courbes larges 90°
Première étape montage à froid pour valider les bonnes dimensions des pièces

Bati principal

Positionnement des coudes pour les tubes support moteurs
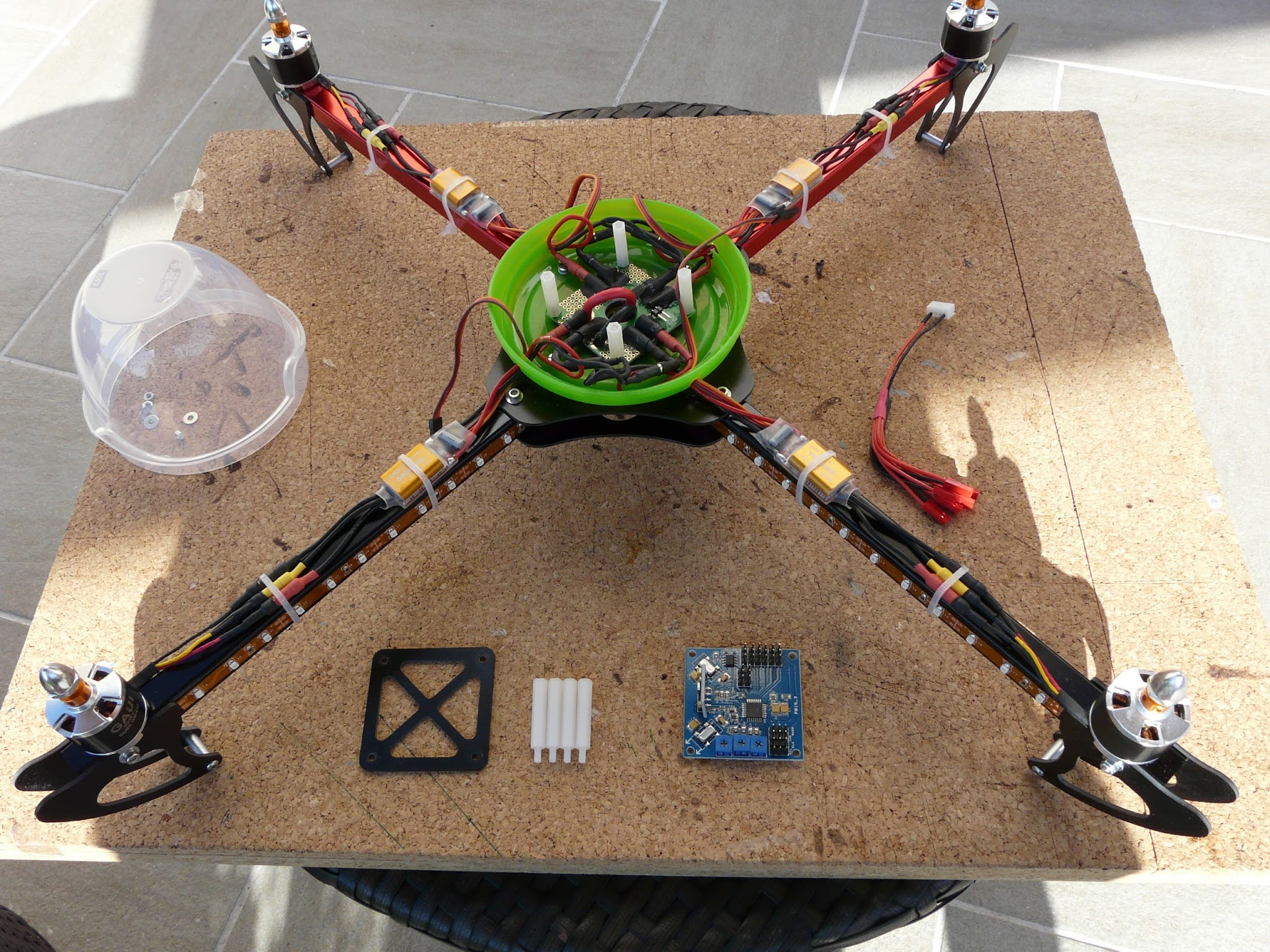
Positionnement des tubes support moteur, ça ressemble à une araignée.
Comme expliqué par Eric dans son guide il faut supprimer les bourrelets dans les T avec une dremel, les collages avec les tubes sont ainsi parfaits.
Le poids final obtenu est de 316g avant collage, et 327g après collage ce qui est raisonnable.
Pensez à passer des fils dans les coudes sur le bati principal pour faciliter ensuite la mise en place des câbles moteur vers les controleurs, comme ceci :
La suite avec l'arrivée des moteurs et controleurs, auparavant il me faut trouver les supports que je vais poser sur les tubes pour les accueillir.